




Blog
From AGVs to AMRs: The evolution of material handling automation

Material handling automation isn’t new to manufacturing: the first instances of automation were widely used in the automotive industry, where a car chassis attached to a chain moved down the line, bringing the product to the assembly line workers. Prototype industrial robots were seen in General Motors facilities as early as 1961 and then in 1969, the Stanford Arm introduced new capabilities that previous robots didn’t have: six degrees of freedom. Over time, as other industries began to adopt automation and the market need for more advanced products skyrocketed, automated material movement began to evolve.
The first automated material movement robot
Automated guided vehicles (AGVs) were first introduced to the market many decades ago as the first of these automation advancements. Chains were first replaced with breadcrumbs of magnets, but this required drilling into the factory floor. Shortly thereafter, a magnetic line was introduced, allowing a relative ease of reconfiguration, but facilities needed to constantly monitor and repair the tape. Wire followers buried in the factory floor came next, typically used in Very Narrow Aisle (VNA) warehousing, where the vehicle, either automated or manual, would lock onto the wire.
As a more modern offshoot to the breadcrumb approach, AGVs can now utilize unique QR codes taped to the floor and laser-based navigation using reflective targets in pre-programmed positions throughout the facility, helping the AGV understand its precise location in the factory.
However, all of these localization methods throughout AGV history require significant investment in assets on or in the floor, requiring frequent and expensive facility reconfiguration. Additionally, while AGVs can perceive their environment in a simple and aided way, they must follow a specifically set track, limiting the necessary flexibility that the market requires.
The logical evolution from AGV to AMR
Due to the market demand for increased flexibility in the automation of material movement, the next logical step for robotics providers was to create a solution that no longer required physical aids. Today, robots can perceive its surroundings, compare data against a map stored onboard, and make a determination on where it is. These enhanced robots are called autonomous mobile robots (AMRs).
The fundamental improvement that AMRs made to material handling automation is characterized by how they traverse the specified operating environment. An AGV traverses the environment automatically along predefined guidepaths (virtual or physical) using collision avoidance technology. When an obstacle blocks its path, the AGV must wait until a human intervenes to remove the blockage before it can continue, limiting productivity.
There is no concept of local replanning or global replanning; the vehicle just follows the path that it was instructed to take.
David Northup
Director of Product Management, OTTO Motors
An AMR, however, traverses the environment autonomously, with the ability to navigate using obstacle and collision avoidance by detecting blockages with sensors. When a blockage is detected, the AMR adjusts its path by computing an obstacle-free route rather than using a predefined path, improving productivity.
It knows where it is, it knows where it has to go; it decides how to get there on its own.
David Northup
Director of Product Management, OTTO Motors
AMR navigation and the three distinct capabilities
The AMR’s ability to autonomously navigate between two endpoints and around obstacles can be broken down into three distinct capabilities that have evolved and advanced since the AGV:
1. AMR localization
Localization is the method by which a robot determines its location within a facility, and throughout the history of AGVs and AMRs, there have been many different localization technologies.
AGV localization:
- Magnetic lines, QR codes on the floor, and triangulation (known points, such as QR codes on the wall): These technologies require significant investment in installation, upkeep and change management, and limit flexibility.
- Triangulation (unknown, friendly points such as lidar reflectors): Similar to QR codes on the wall, LiDAR reflectors permit the robot to triangulate it’s position using the very strong return signal from the LiDAR sensor bouncing back, requiring line of sight to many reflectors in order to confidently triangulate its position in the facility. This technology requires a careful layout of the reflectors to ensure no repeating patterns, and it requires significant investment to install, maintain and support changes to the facility.
- Pretrained map (“natural feature navigation”, “Simultaneous Localization and Mapping (SLAM)”: Robots can use the natural features of the facility to generate a map, used to locate itself within the map as it drives. This involves high sensitivity to change within the facility and might include adjustments of stationary assets and the regular movement and flow of transitory material.
Advanced AMR localization:
- Continuous SLAM: Building on the concept of using natural features, continuous SLAM permits the robot to map and localize using its environment without modification. It also updates the map over time to account for changes, greatly increasing the robot’s ability to stay confident in its calculated position. Operating at double speed, the video below shows an AMR mapping its environment by driving through the facility.
2. AMR path planning
Path planning is the process by which the route between two points is generated. When an AGV needs to get from A to B, either the robot or the server selects from a pre-configured list of options. The AGV’s motions are expected to adhere to a set guidepath.
When an AMR needs to get from A to B, however, it generates its own path. An AMR assesses and calculates options using the map of the facility, its current position, and traffic management rules in effect, such as stop signs, aisles, one-way areas, intersections, queue points, no entry zones, speed limits, and more. The AMR’s motions are driven by the robot’s onboard path planning and navigation software, and does not follow a specific guidepath unless explicitly instructed to do so.
Additionally, while AGVs are typically charged through a manual plug-in or strategically placed electrical contacts, AMRs are able to charge opportunistically. When an AMR is not working on a task, the robot can autonomously navigate to a charging station separated from the workflow and wait until the next job is assigned.
An AMR is also aware of its kinematics. It knows how well it handles corners, how much space it needs to stop, and the size of its safety fields. The robot uses that information to generate its own path.
AGVs use three main path planning technologies today:
- None (for example, magnetic lines): Both the robot and the supervisor software do not have any control over the route. The robot is instructed to proceed “x” meters forward.
- User created paths (for example, virtual line follower): The user creates paths either by manipulating the robot within the environment, or by utilizing tools within the supervisory software. The robot is then instructed to repeat these routes precisely.
- Fleet Manager-created paths: The user defines endpoints and the supervisory software calculates the route either at startup or on demand and provides it to the robot. The robot is then instructed to execute this route precisely.
Innovative AMRs have evolved, instead using:
- Robot-created paths (kinematically aware): The user defines endpoints within the facility map. At the beginning of every job, the robot generates its route taking into account all required "rules of the road" captured within the map as well as its own capabilities, including acceleration, deceleration, safety footprint, turning capabilities, and more. Demonstrated in the video below, two AMRs plan their routes, considering one-way paths, turning capabilities, and stop signs.
3. AMR obstacle handling
AMRs have the innate ability to problem solve their way around obstacles. When a static obstacle is encountered, an AMR will wait a certain amount of time to see if the obstacle, such as a person, moves away. If it does not, like a box on the ground, the AMR will initiate a replan around that obstacle, considering parameters like the amount of space available near the obstacle. The AMR will either autonomously drive around the obstacle or turn around and find the next most efficient way through the facility to its destination.
AMRs are also able to constantly assess dynamic obstacles. When an AMR detects a grouping of sensor hits that appears to represent a moving object, like a person or vehicle, that group is analyzed to determine if it’s on an intercept course. If so, the AMR will adjust its path accordingly.
There are two main ways an AGV will react to a surprise obstacle in its path:
- None (LiDAR): The robot will not make physical contact with the obstacle before stopping, but it will also not attempt to navigate around it, remaining blocked.
- Circumnavigate small obstacles in large aisles: The robot will not make physical contact with the obstacle and will attempt to maneuver around the obstacle if given enough space. The robot will not replan its path and may become blocked.
AMRs take a more advanced approach:
- Replans as necessary to accomplish the mission: The robot will not make physical contact with the obstacle and will attempt to maneuver around the obstacle if given enough space. If required, the robot will either request a new path from the supervisor software or replan on its own to utilize alternate routes. In the video below, an AMR stops when a person crosses its path. It waits until the person is gone before safely continuing on its route.
What technologies comprise an innovative AMR?
Unlike AGVs of the past, the most innovative AMRs have the ability to:
- Stay localized in very dynamic environments
- Operate safely beside and around humans and other equipment
- Charge opportunistically
- Plan its own path
- Replan around static obstacles
- Perceive and react to dynamic obstacles
- Apply traffic management rules to smoothly integrate into the realities of your facility
- Change workflows at a moment’s notice
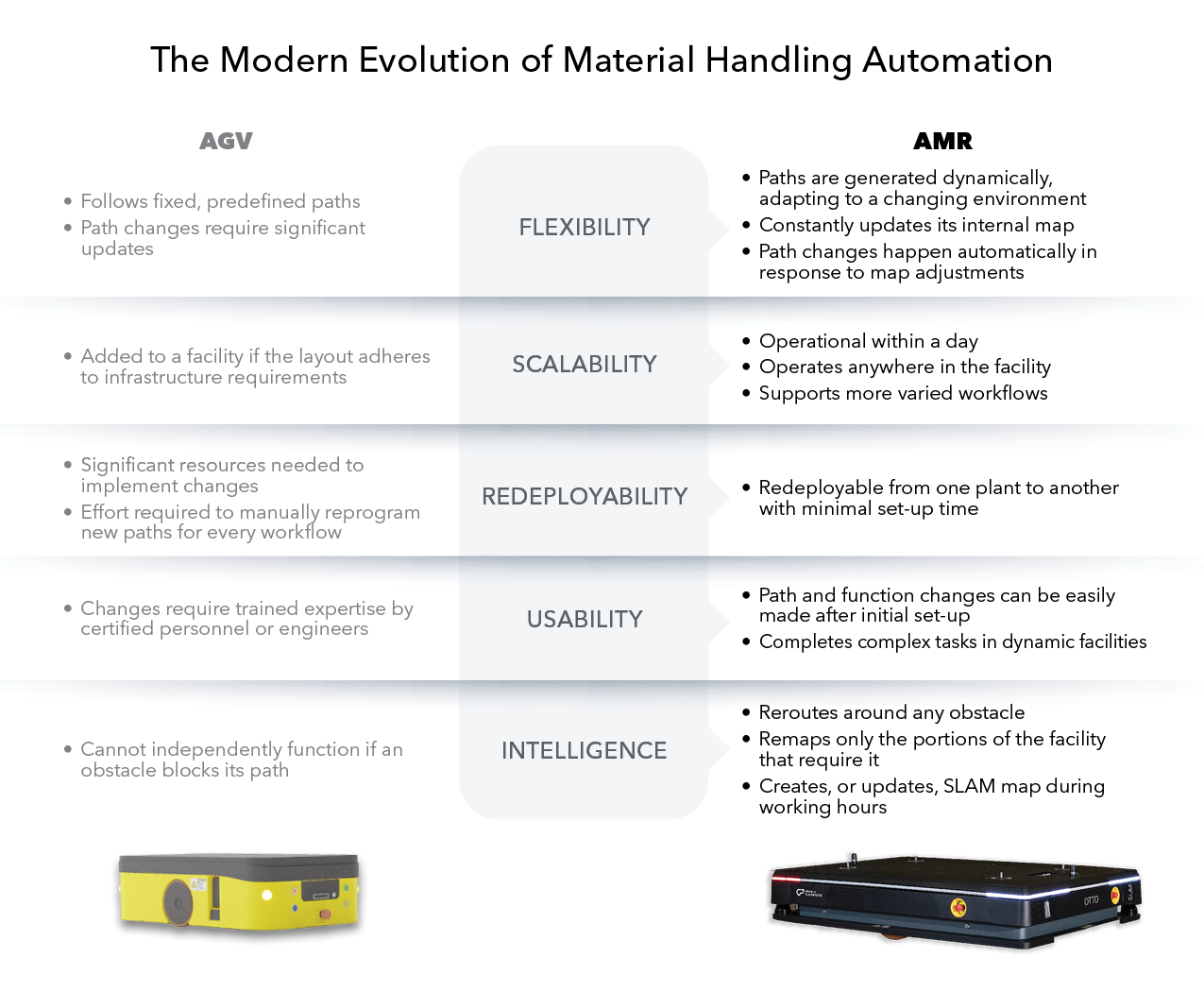
Over time, AGVs have developed from chains and QR codes to navigating a complex factory floor. However, AGVs always had a gap: they were not flexible and adaptable enough for dynamic, mission-critical environments. Thus, the innovative AMR was developed to fill the gap, utilizing intelligent localization, path planning and obstacle handling technology to improve productivity in manufacturing facilities and warehouses worldwide.


